Solution approach:
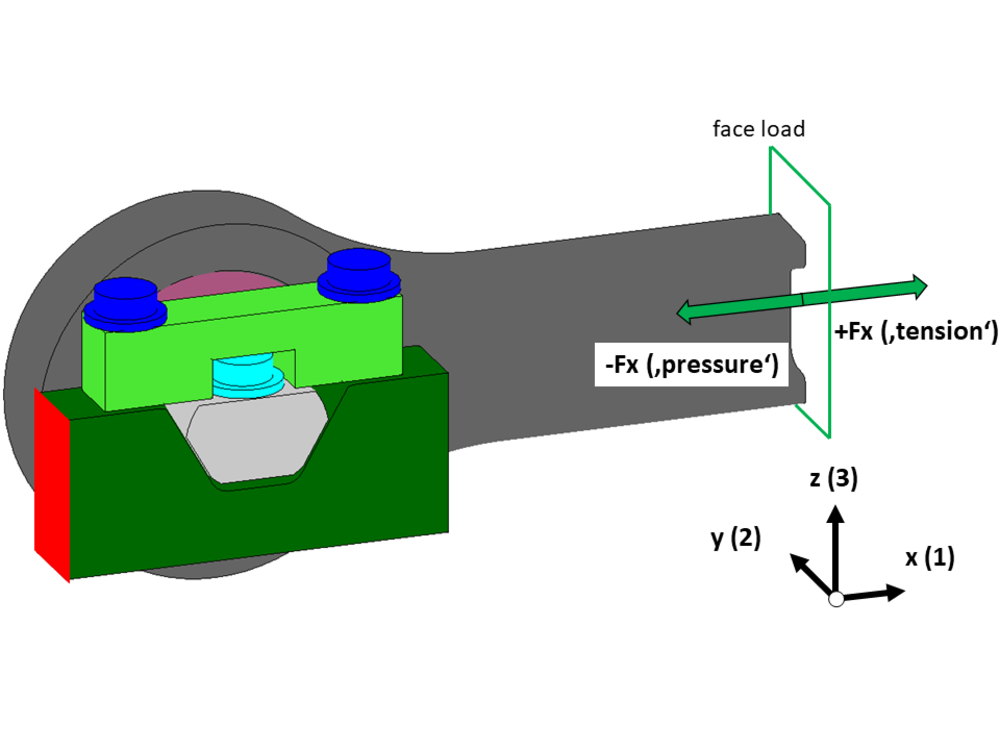
For this purpose, 3D models of the control arm body, as well as the ball joint pins were created. The rubber track was modeled for the calculation according to the customer's design data and mapped using a hyperelastic material model. The bracket was modeled based on the specification to represent the background stiffness. Furthermore, the bolt preloads, as well as the interference fit between the control arm body and the outer sleeve of the bushing were taken into account.
Results:
Positive FKM verification was obtained for both cyclic and static loads. The structural integrity of the components was verified for the specified load cases for our customer.